

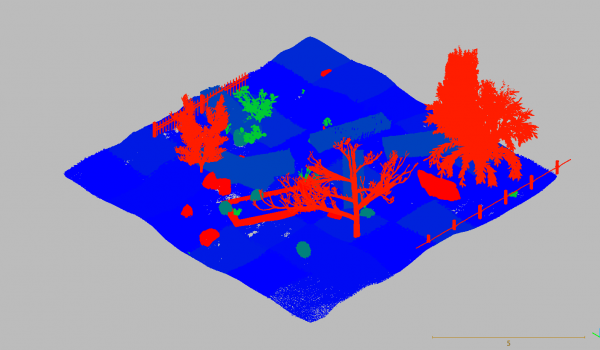
A data set for evaluation of rose stem segmentation
The TrimBot2020 consortium released a data set of rose bush images from the Wageningen garden with ground truth images for evaluation of rose stem segmentation algorithms.

TrimBot2020 at the EU Industry Days 2019
We are partecipating in the EU Industry Days 2019 (5-6 February) in Brussels.
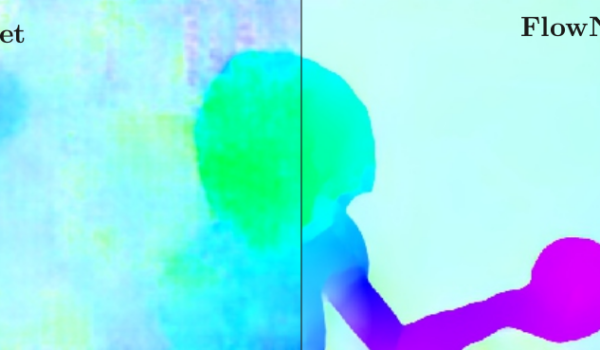
Integration of visual representations – Milestone 4 [Video]
An overview video of integration of visual representations performed on the TrimBot2020 robot.

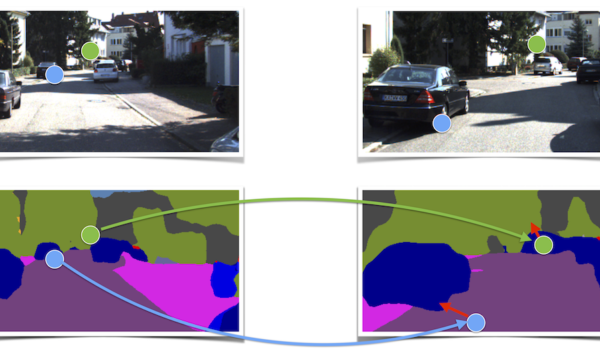
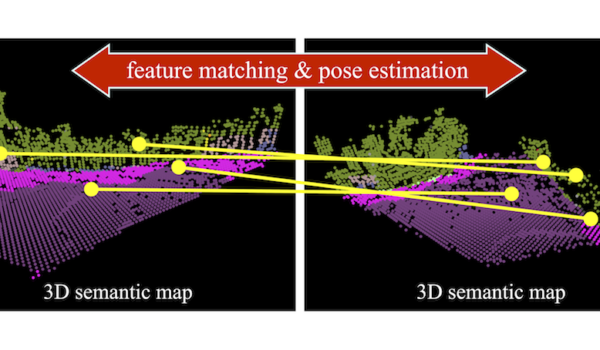
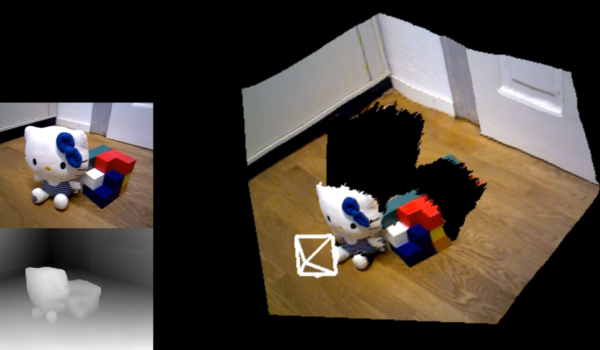
Semantic Visual Localization
Visual localization is the problem of determining the position and orientation from which an image was taken relative to some 3D model of the scene.

3DRMS workshop at ECCV 2018 in Munich [photogallery]
The 3DRMS workshop hosted the talks of three renowed invited speakers, and the presentations and posters of papers about 3D reconstruction and semantics. Find out more about our speakers and presented papers at the workshop website.




