Exhibitor booth at AgriFoodTech 2019 [photos]
Few shots from our successful participation in AgriFoodTech 2019 with an exhibitor booth, where we showed the final results of the TrimBot2020 project.
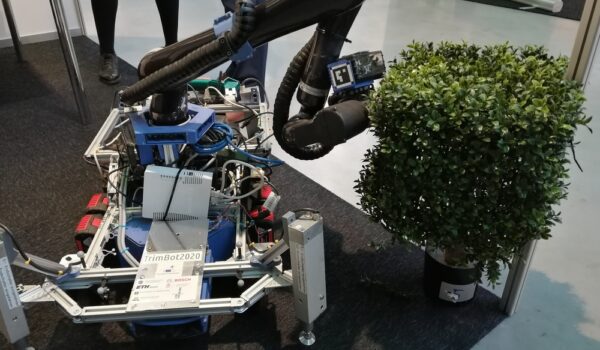
Few shots from our successful participation in AgriFoodTech 2019 with an exhibitor booth, where we showed the final results of the TrimBot2020 project.

Few shots from the Workshop on Agricultural Robotics hald at AgriFoodTech 2019 on December 12.

We will present the final prototype at our exhibitor booth at AgriFoodTech 2019 on December 11 and 12.On December 12 (14:00 – 16:30), we will host a Workshop on Agricultural Robotics in the Zaal 2 of the AgriFoodTech exhibition. Please find more information on the workshop hereand the overal AgriFoodTech program here.

Today, October 25th, we released a media center with videos and articles about the TrimBot2020 project, the newly developed technologies and the successful demonstration we did on September 30th with the EU project reviewers’ team.Please visit the media center at https://trimbot2020.shorthandstories.com/
A demo on Milestone 6 about the integrated video scene understanding algorithms of TrimBot2020.
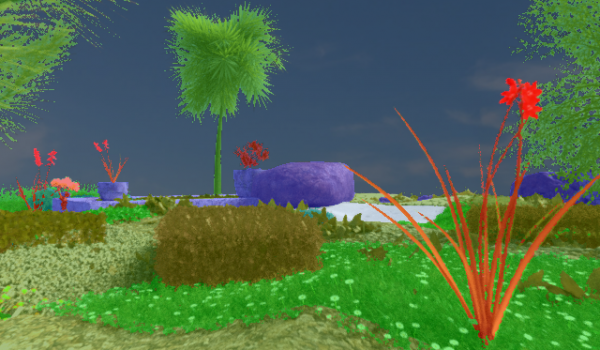
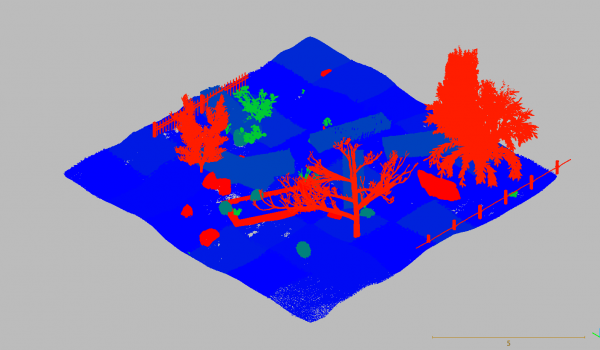
The research group at the University of Amsterdam released a new challenging data set of synthetic garden images with ground-truth albedo, shading, and semantic annotations.

A demo of the TrimBot2020 robotic arm that automatically cuts rose stems.

A complete demo of the TrimBot arm trimming the surface of a bush. 3D Computer Vision algorithms are used to perceive and reconstruct the shape of the bush, then processed to plan the arm and clipper trajectory.
Our project received a mention in an article on the UA magazine, earlier this month. PLease read the full article Artificial Intelligence to the Rescue: Smart Robots are Coming to your Garden
The TrimBot2020 project was mentioned in an article about agricultural robotics by Louise Murray on UK Geographical issue of February 2019.




