Pictures of the consortium meeting in Renningen [Photogallery]
On 27-29 September 2017, we met in Renningen at the Bosch Campus to discuss the advancements of our work. Here some shots of the three days.

On 27-29 September 2017, we met in Renningen at the Bosch Campus to discuss the advancements of our work. Here some shots of the three days.

We present an algorithm that exploits both the underlying 3D structure and image entropy to generate an adaptive matching window.

The TrimBot2020 project was mentioned in an article on Horizon: the EU Research & Innovation magazine. Here an extract of the article, which you can read here. “It’s a similar story for the robotic hedge trimmer being developed by a separate group of researchers. All the farmer or groundskeeper needs to do is mark which hedge needs trimming. ‘The user will sketch the garden, though not too accurately,’ said Bob Fisher, computer vision scientist at Edinburgh University, UK, and coordinator…
In this paper we present an algorithm which recovers the rigid transformation that describes the displacement of a binocular stereo rig in a scene, and uses this to include a third image to perform dense trinocular stereo matching and reduce some of the ambiguities inherent to binocular stereo.
We present a system that generates 3D depth information in real-time based on a four camera setup while maintaining a low power budget.

Check out what the TrimBot2020 sees from its new 10 stereo camera rig
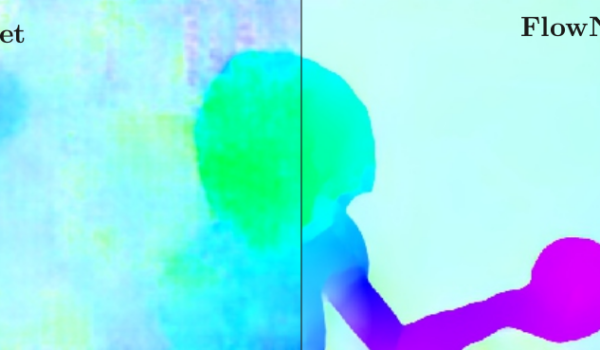
FlowNet 2.0 is the first optical flow approach based on deep learning that reaches state-of-the-art accuracy. At the same time it is by a factor 100 faster than previous state-of-the-art techniques. This allows for reliable motion estimation at interactive frame rates. For more information visit the paper page.
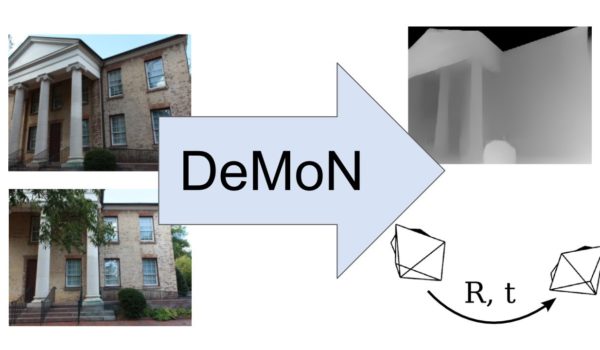
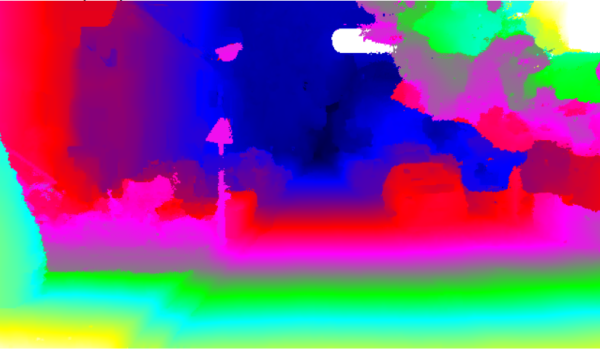
DeMoN is the very first work that formulates the problem of joint egomotion and depth estimation as a pure learning problem. Given two images from a single moving camera, DeMoN can estimate depth and camera motion at interactive frame rates. For more information, please visit the website.

The data set for the 3D reconstruction challenge of the TrimBot 3DRMS workshop at ICCV2017 is available for download at the url https://gitlab.inf.ed.ac.uk/3DRMS/Challenge2017. Please find more information about the workshop here.




