Visual localization is the problem of determining the position and orientation from which an image was taken relative to some 3D model of the scene.
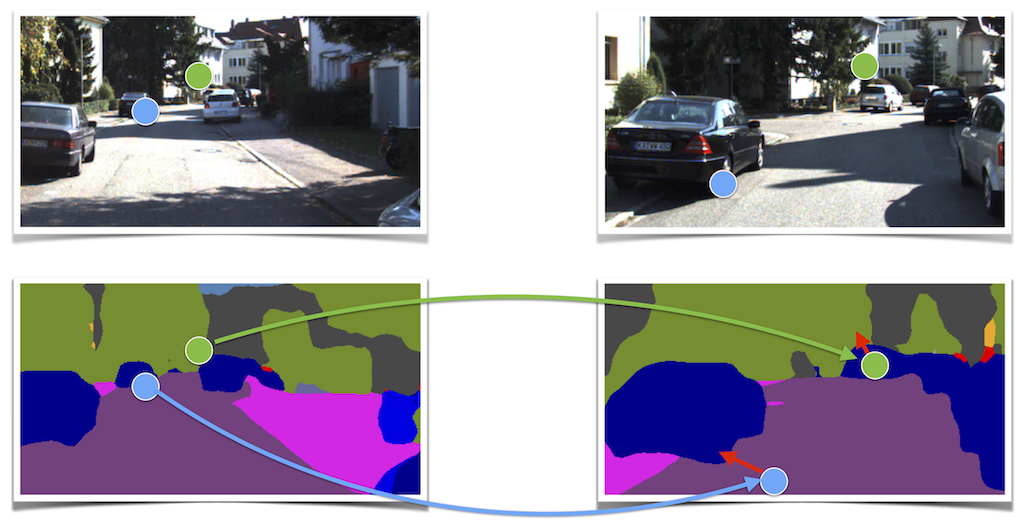
It is a key problem to solve for any type of autonomous vehicle and has also applications in Augmented and Mixed Reality. Previous works on visual localization had problems handling large changes in viewpoint and changes in scene geometry and appearance, e.g., due to seasonal changes. In this work, we aim to overcome these limitations by integrating semantic scene understanding into a localization pipeline.
Please find the full paper in the Publication list or here





{kind=link}