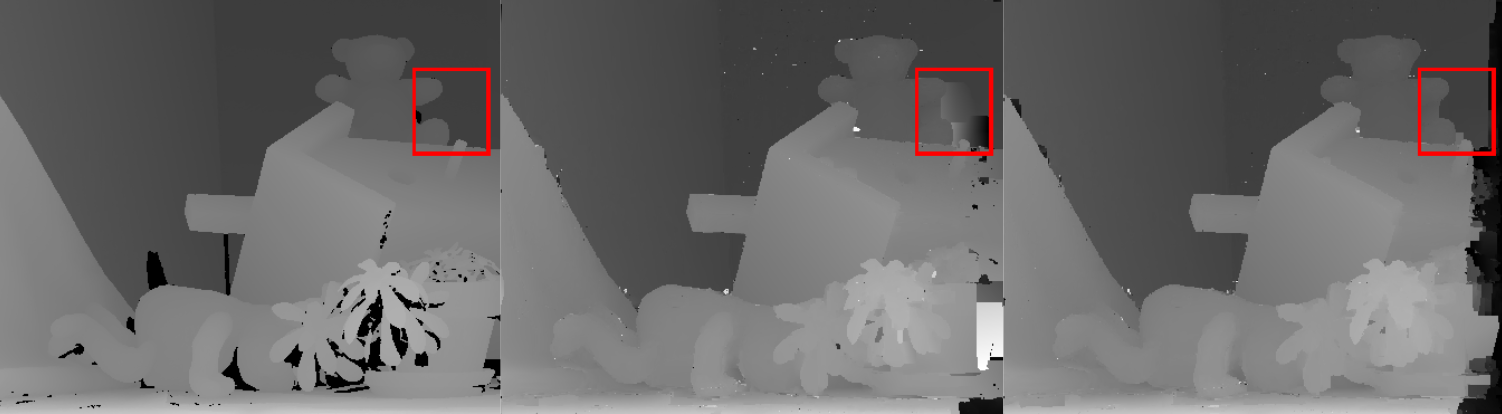
We present an algorithm that exploits both the underlying 3D structure and image entropy to generate an adaptive matching window.
The algorithm estimates real valued disparity maps by smartly exploring a 3D search space using a novel hypothesis generation approach that acts like a propagation scheduler. The proposed approach is among the top performing results when evaluated using the Middlebury and KITTI 2015 benchmarks.
You can download the PDF of the contribution from the team in Edinburgh here or from the publication list page.





{kind=link}