New data set released: semantic segmentation and instrinsics decomposition
The research group at the University of Amsterdam released a new challenging data set of synthetic garden images with ground-truth albedo, shading, and semantic annotations.
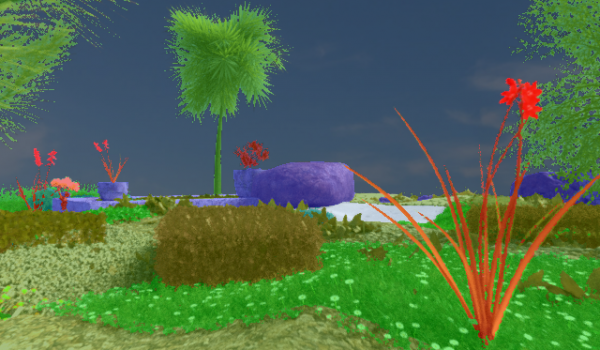
The research group at the University of Amsterdam released a new challenging data set of synthetic garden images with ground-truth albedo, shading, and semantic annotations.

The TrimBot2020 consortium released a data set of rose bush images from the Wageningen garden with ground truth images for evaluation of rose stem segmentation algorithms.
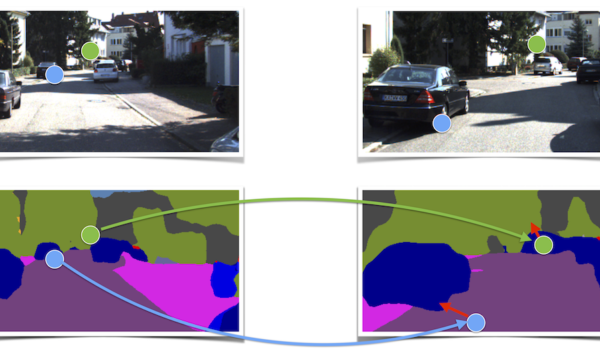
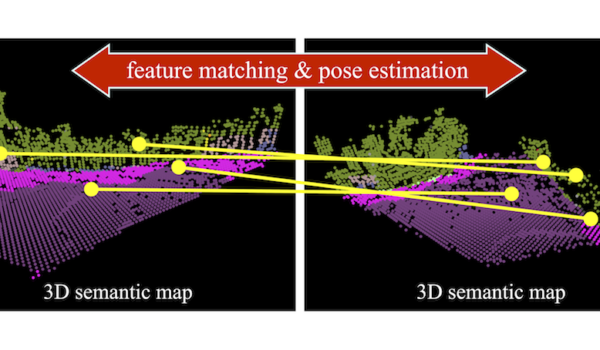
Visual localization is the problem of determining the position and orientation from which an image was taken relative to some 3D model of the scene.

The Wageningen team has been awarded with the “Innovation and Development award” at EurAgEng 2018.


An overview paper of the project activities has been accepted for oral presentation at the 50th International Symposium on Robotics (20-21 June 2018, Munich).
We present an algorithm that exploits both the underlying 3D structure and image entropy to generate an adaptive matching window.




